Dissecando o coração do drone, também conhecido como "program.elf"
Mais um post na série de depuração do ardrone v1, após conectar no access point wifi criado pelo drone, é possível fazer abrir uma conexão telnet no drone (ip=192.168.1.1). Como já sabemos, o ardrone é um Linux embarcado que voa.
Logo praticamente toda mágica que faz ele voar está implementada em um único programa, que neste caso é o “program.elf” que está rodando com PID 971, segundo a lista de processo abaixo. O “program.elf” é executado durante o boot do Linux pois está no scripts de inicialização do sistema.
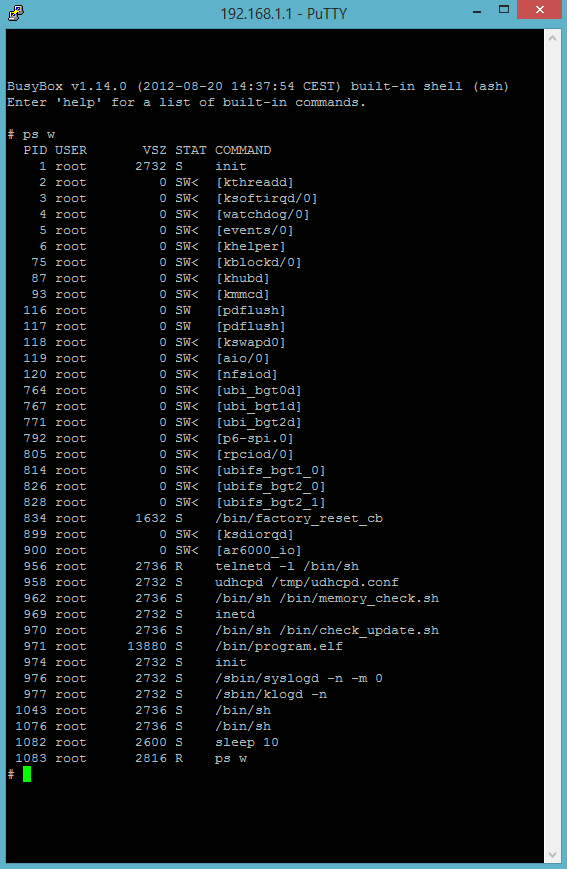 |
| "program.elf" em execução no pid 971 |
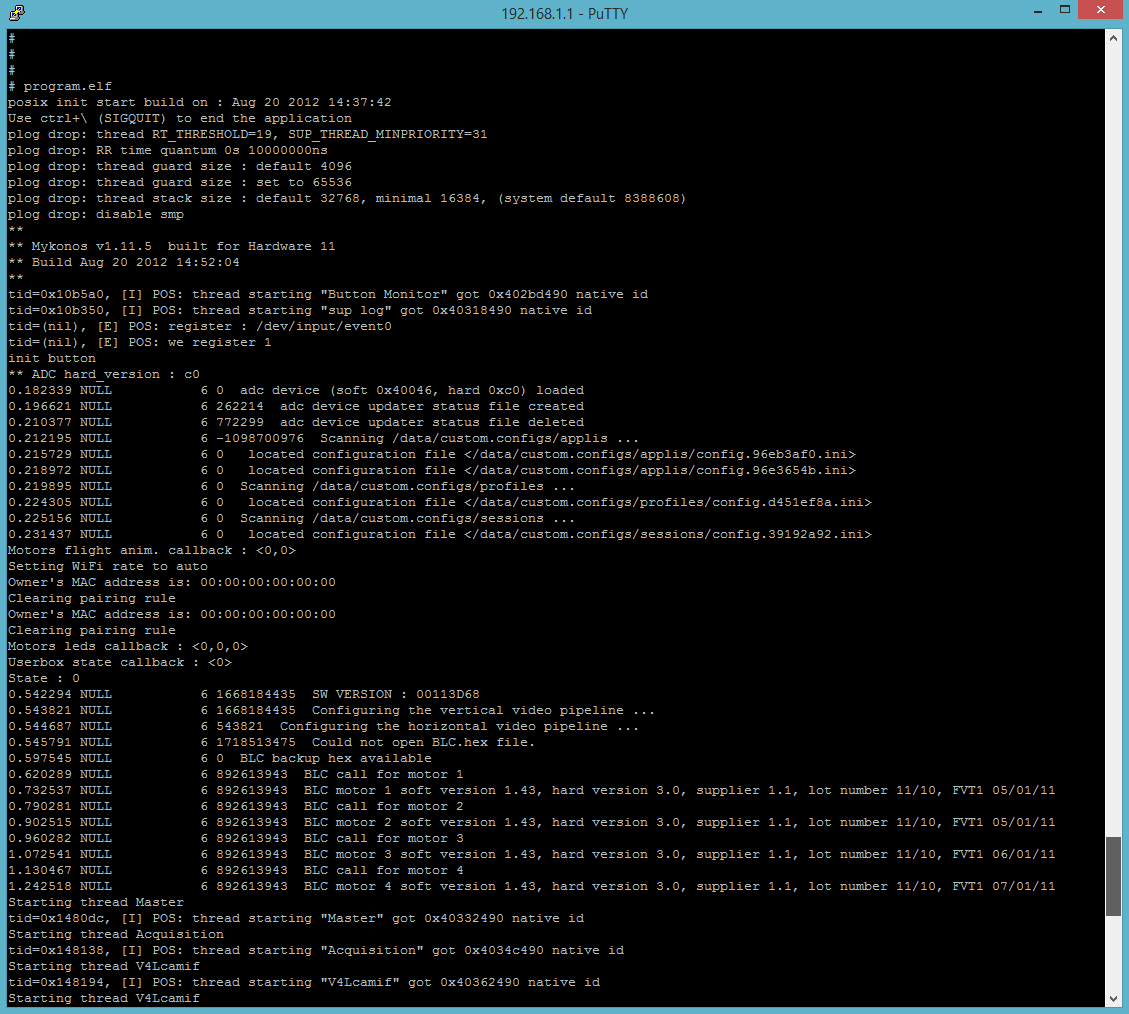 |
| "program.elf" verificando os sensores e câmeras do sistema. |
 |
| Após alguns segundo de execução o "program.elf" começa a implicar com a bateria, mas não só com a bateria, com a fonte de PC também, logo o podemos deduzir que problema não é dá bateria, e sim do "program.elf" que está medindo algo do jeito errado, ou seja, um bug. A versão desse "program.elf" que está rodando é o 1.11.5. |
 |
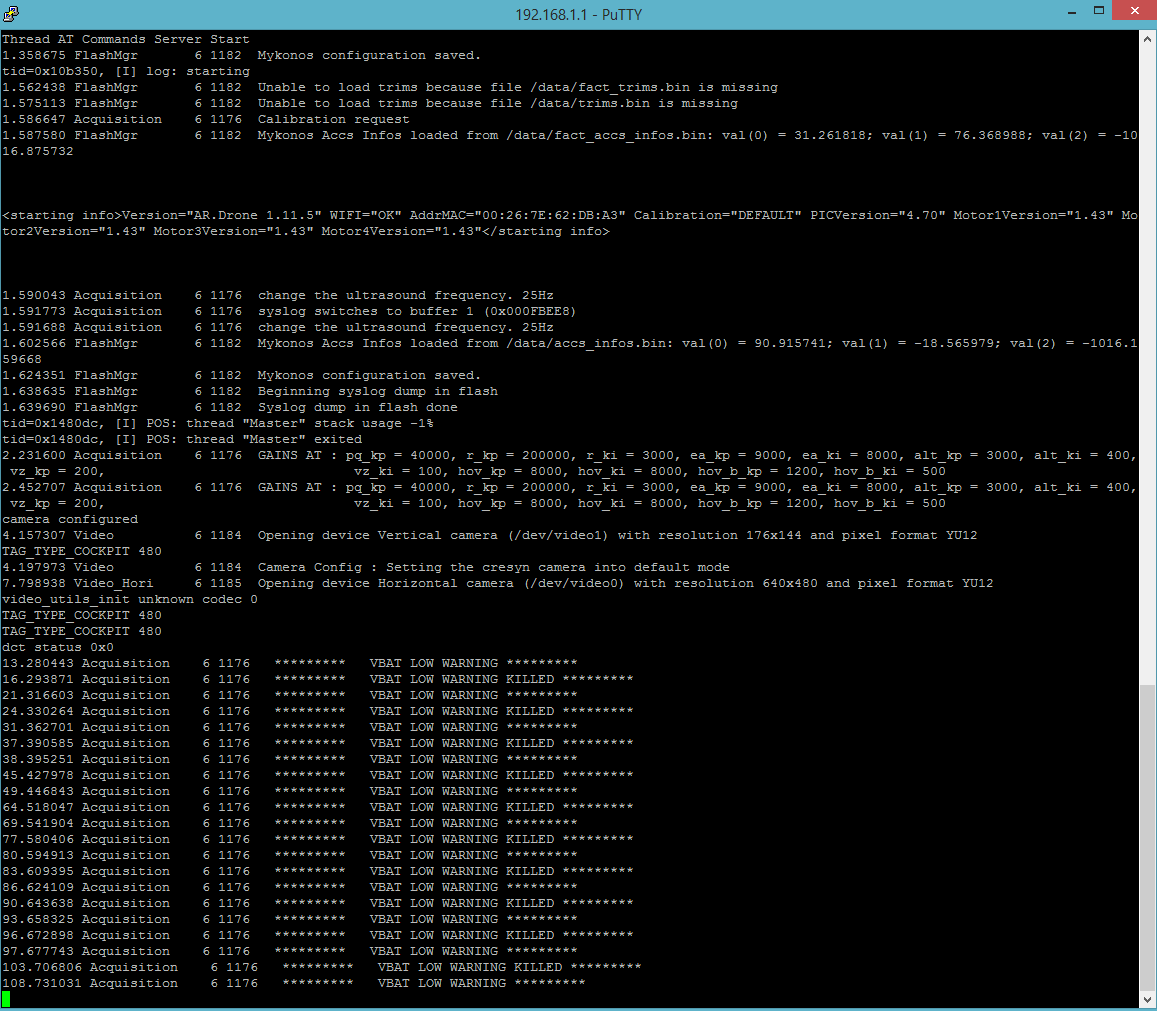
| Esse bug cabuloso da versão 1.11.5, fica enviando sinal de pouso de emergência mesmo usando a fonte de PC com energia infinita!!! |
Nos próximos posts, irei mostrar como executar uma alternativa open-source para substituir o “program.elf”, e que permite controlar cada um dos componentes do drone individualmente, ou seja, tem como testar cada motor individualmente ou em conjunto, placa de navegação e tudo mais. Além de implementar uma nova lógica de controle de estabilização do drone, permitindo até fazer os flips, piruetas e acrobacias 3D. E controlar o drone usando controle de Xbox 360 a partir do PC / Notebook.
Para finalizar, segue abaixo o log completo da saída do “program.elf” em texto plano.
#
program.elf
posix init start build on : Aug 20 2012 14:37:42
Use ctrl+\ (SIGQUIT) to end the application
plog drop: thread RT_THRESHOLD=19, SUP_THREAD_MINPRIORITY=31
plog drop: RR time quantum 0s 10000000ns
plog drop: thread guard size : default 4096
plog drop: thread guard size : set to 65536
plog drop: thread stack size : default 32768, minimal 16384, (system default 8388608)
plog drop: disable smp
**
** Mykonos v1.11.5 built for Hardware 11
** Build Aug 20 2012 14:52:04
**
tid=0x10b5a0, [I] POS: thread starting “Button Monitor” got 0x402bd490 native id
tid=0x10b350, [I] POS: thread starting “sup log” got 0x40318490 native id
tid=(nil), [E] POS: register : /dev/input/event0
tid=(nil), [E] POS: we register 1
init button
** ADC hard_version : c0
0.182339 NULL 6 0 adc device (soft 0x40046, hard 0xc0) loaded
0.196621 NULL 6 262214 adc device updater status file created
0.210377 NULL 6 772299 adc device updater status file deleted
0.212195 NULL 6 -1098700976 Scanning /data/custom.configs/applis …
0.215729 NULL 6 0 located configuration file
0.218972 NULL 6 0 located configuration file
0.219895 NULL 6 0 Scanning /data/custom.configs/profiles …
0.224305 NULL 6 0 located configuration file
0.225156 NULL 6 0 Scanning /data/custom.configs/sessions …
0.231437 NULL 6 0 located configuration file
Motors flight anim. callback : <0>
Setting WiFi rate to auto
Owner’s MAC address is: 00:00:00:00:00:00
Clearing pairing rule
Owner’s MAC address is: 00:00:00:00:00:00
Clearing pairing rule
Motors leds callback : <0>
Userbox state callback : <0>
State : 0
0.542294 NULL 6 1668184435 SW VERSION : 00113D68
0.543821 NULL 6 1668184435 Configuring the vertical video pipeline …
0.544687 NULL 6 543821 Configuring the horizontal video pipeline …
0.545791 NULL 6 1718513475 Could not open BLC.hex file.
0.597545 NULL 6 0 BLC backup hex available
0.620289 NULL 6 892613943 BLC call for motor 1
0.732537 NULL 6 892613943 BLC motor 1 soft version 1.43, hard version 3.0, supplier 1.1, lot number 11/10, FVT1 05/01/11
0.790281 NULL 6 892613943 BLC call for motor 2
0.902515 NULL 6 892613943 BLC motor 2 soft version 1.43, hard version 3.0, supplier 1.1, lot number 11/10, FVT1 05/01/11
0.960282 NULL 6 892613943 BLC call for motor 3
1.072541 NULL 6 892613943 BLC motor 3 soft version 1.43, hard version 3.0, supplier 1.1, lot number 11/10, FVT1 06/01/11
1.130467 NULL 6 892613943 BLC call for motor 4
1.242518 NULL 6 892613943 BLC motor 4 soft version 1.43, hard version 3.0, supplier 1.1, lot number 11/10, FVT1 07/01/11
Starting thread Master
tid=0x1480dc, [I] POS: thread starting “Master” got 0x40332490 native id
Starting thread Acquisition
tid=0x148138, [I] POS: thread starting “Acquisition” got 0x4034c490 native id
Starting thread V4Lcamif
tid=0x148194, [I] POS: thread starting “V4Lcamif” got 0x40362490 native id
Starting thread V4Lcamif
tid=0x1481f0, [I] POS: thread starting “V4Lcamif” got 0x40378490 native id
Starting thread Navdata
tid=0x14824c, [I] POS: thread starting “Navdata” got 0x40392490 native id
Starting thread vp_com_server
tid=(nil), [W] POS: vp_com_server : stack size 8192 is too small, setting to 16384
tid=0x1482a8, [I] POS: thread starting “vp_com_server” got 0x403a8490 native id
Starting thread ATCmdServer
tid=0x148304, [I] POS: thread starting “ATCmdServer” got 0x403c2490 native id
Starting thread FlashMgr
tid=0x148360, [I] POS: thread starting “FlashMgr” got 0x403dc490 native id
Starting thread vbat
tid=0x1483bc, [I] POS: thread starting “vbat” got 0x403f6490 native id
Starting thread Video
tid=0x148418, [I] POS: thread starting “Video” got 0x40410490 native id
Starting thread Video_Hori
tid=0x148474, [I] POS: thread starting “Video_Hori” got 0x4042a490 native id
Starting thread Leds
tid=0x1484d0, [I] POS: thread starting “Leds” got 0x40444490 native id
Starting thread ImageBox
tid=0x14852c, [I] POS: thread starting “ImageBox” got 0x4045e490 native id
tid=(nil), [W] POS: disable smp
thread start
Thread AT Commands Server Start
1.337714 FlashMgr 6 1488 Mykonos configuration saved.
tid=0x10b350, [I] log: starting
1.541467 FlashMgr 6 1488 Unable to load trims because file /data/fact_trims.bin is missing
1.554083 FlashMgr 6 1488 Unable to load trims because file /data/trims.bin is missing
1.565681 Acquisition 6 1482 Calibration request
1.566619 FlashMgr 6 1488 Mykonos Accs Infos loaded from /data/fact_accs_infos.bin: val(0) = 31.261818; val(1) = 76.368988; val(2) = -1016.875732
1.569034 Acquisition 6 1482 change the ultrasound frequency. 25Hz
1.570774 Acquisition 6 1482 syslog switches to buffer 1 (0x000FBEE8)
1.570690 Acquisition 6 1482 change the ultrasound frequency. 25Hz
1.581957 FlashMgr 6 1488 Mykonos Accs Infos loaded from /data/accs_infos.bin: val(0) = 90.915741; val(1) = -18.565979; val(2) = -1016.159668
1.603352 FlashMgr 6 1488 Mykonos configuration saved.
1.617712 FlashMgr 6 1488 Beginning syslog dump in flash
1.618710 FlashMgr 6 1488 Syslog dump in flash done
tid=0x1480dc, [I] POS: thread “Master” stack usage -1%
tid=0x1480dc, [I] POS: thread “Master” exited
2.211181 Acquisition 6 1482 GAINS AT : pq_kp = 40000, r_kp = 200000, r_ki = 3000, ea_kp = 9000, ea_ki = 8000, alt_kp = 3000, alt_ki = 400, vz_kp = 200, vz_ki = 100, hov_kp = 8000, hov_ki = 8000, hov_b_kp = 1200, hov_b_ki = 500
2.431739 Acquisition 6 1482 GAINS AT : pq_kp = 40000, r_kp = 200000, r_ki = 3000, ea_kp = 9000, ea_ki = 8000, alt_kp = 3000, alt_ki = 400, vz_kp = 200, vz_ki = 100, hov_kp = 8000, hov_ki = 8000, hov_b_kp = 1200, hov_b_ki = 500
camera configured
4.116301 Video 6 1490 Opening device Vertical camera (/dev/video1) with resolution 176x144 and pixel format YU12
TAG_TYPE_COCKPIT 480
4.155146 Video 6 1490 Camera Config : Setting the cresyn camera into default mode
7.723848 Video_Hori 6 1491 Opening device Horizontal camera (/dev/video0) with resolution 640x480 and pixel format YU12
video_utils_init unknown codec 0
TAG_TYPE_COCKPIT 480
TAG_TYPE_COCKPIT 480
dct status 0x0
9.248981 Acquisition 6 1482 *** VBAT LOW WARNING *******
12.265384 Acquisition 6 1482 *** VBAT LOW WARNING KILLED *******
16.287392 Acquisition 6 1482 *** VBAT LOW WARNING *******
20.309354 Acquisition 6 1482 *** VBAT LOW WARNING KILLED *******
33.381706 Acquisition 6 1482 *** VBAT LOW WARNING *******
38.409263 Acquisition 6 1482 *** VBAT LOW WARNING KILLED *******
42.431519 Acquisition 6 1482 *** VBAT LOW WARNING *******