Drone- STM32F1
Iniciando o projeto com Openpilot, Nuttx e PX4 Autopilot.
https://github.com/TauLabs/TauLabs/wiki
http://www.openpilot.org/products/openpilot-coptercontrol-platform/
Port do OpenPilot para STM32F103 com MPU6050 (i2c)
http://www.rcgroups.com/forums/showthread.php?t=1778845
https://github.com/TauLabs/TauLabs/wiki
http://www.openpilot.org/products/openpilot-coptercontrol-platform/
Port do OpenPilot para STM32F103 com MPU6050 (i2c)
http://www.rcgroups.com/forums/showthread.php?t=1778845
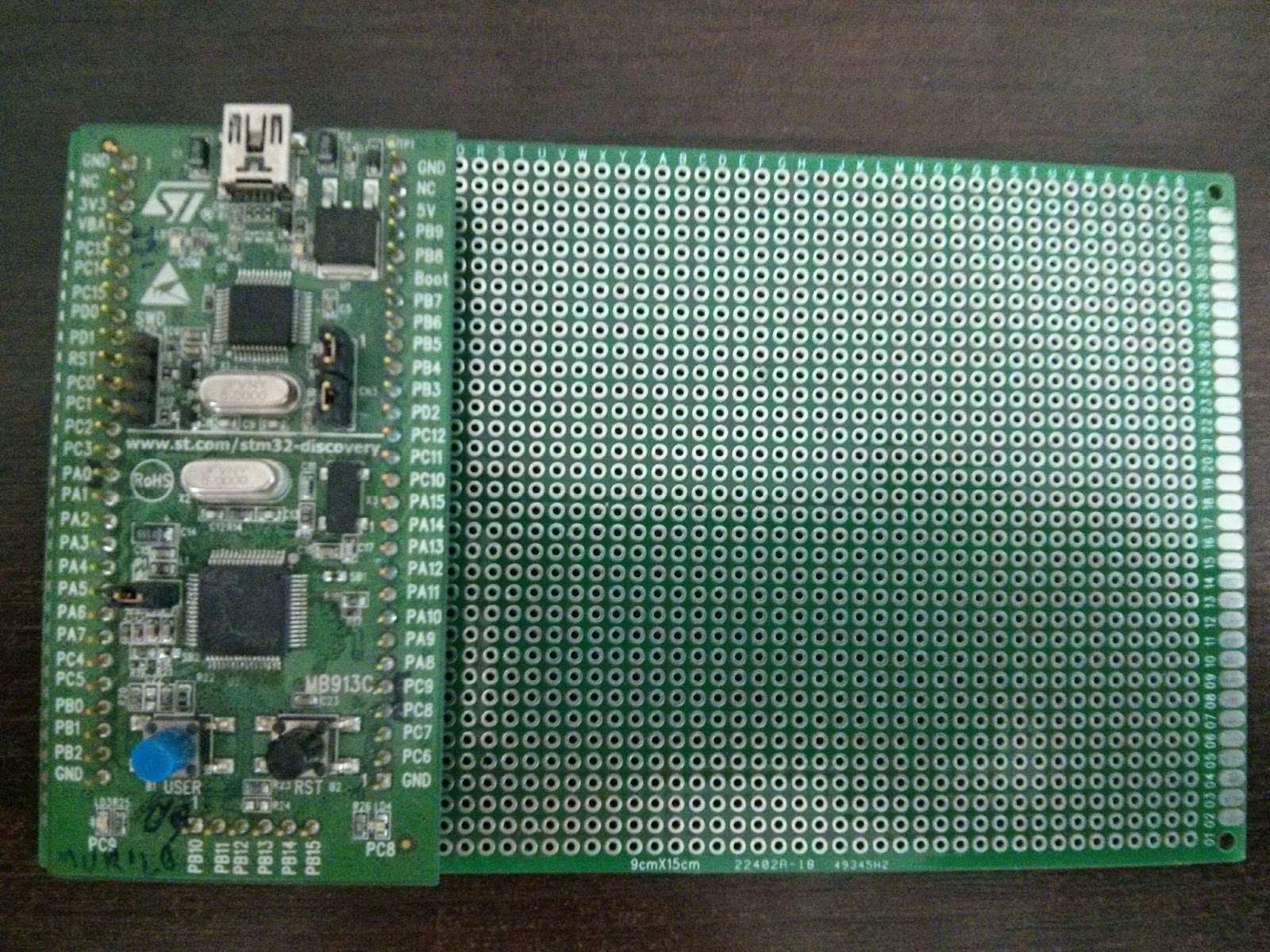 |
| STM32 VL Discovery |
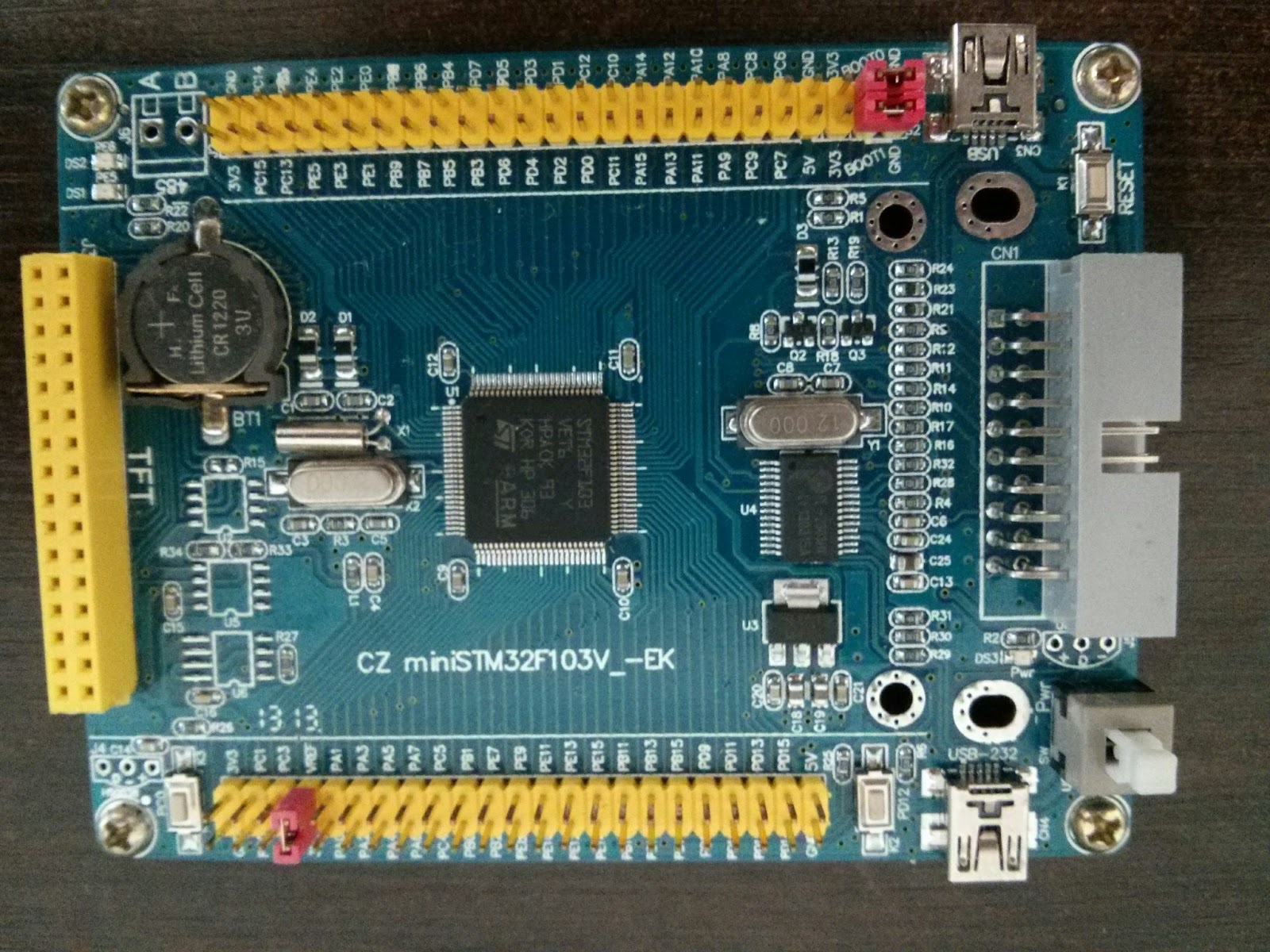 |
CZ mini STM32F103V DK
|