Drone- STM32F4 Taulabs
Baseado no autopilot Taulabs
https://github.com/TauLabs/TauLabs/wiki/Creating-a-FlyingF4-from-scratch
PCB dupla face montada com placa de expansão da STM32F4 Discovery
 |
| STM32F4 almost ready I2C: GY-86 10DOF (MPU6050, HMC5883, MS5611) UART2: GY-GPS6MV1 (Ublox Neo-6M) UART3: ESP8266 / ESP-01 (WiFi AP with transparent serial over TCP for Ground Station) Receiver is Frsky D8R-II Plus Transmitter is Frsky Taranis Plus Two turnigy MX-M80l servos for camera stabization |
###
###
Pinout para montagem do Flying F4
 |
| STM32F4 Discovery pinout for Taulabs Flying F4 |
###
FPV
O kit FPV é composto pelo:
-
Transmissor Boscam TS351 de 5.8 GHz + Camera CDD Sony cxd3172ar
-
Receptor Boscam RC305 de 5.8 GHz + TV Sony
-
Dois servos Turnigy MX-M801
###
###
Flying F4 ADC / battery monitor
Conectar a saida V do APM PM no pino PC1
Conectar a saida I do APM PM no pino PC2
Ativar o “Battery monitor” pelo GCS
Reiniciar o FlyingF4
Calibrar o monitor com ajuda de um multímetro.
O monitor pode ser acessado usando:
-
na telemetria do GCS se uma Uart estiver configurar como “Telemetry” + ESP01 WiFi Serial.
-
na telemetria do Taranis com D8RII se uma Uart estiver configurada como FrSky Sensor Hub
-
na telemetria do Taranis com X8R se uma Uart estiver configurada como FrSky SPort Telemetry
###
Usando as portas analógicas do D8R-II-Plus
A telemetria da bateria também pode ser feita usando as entradas analógicas do D8R-II.
O “APM Power Module” deve ser conectado nas portas A0 e A1 do receptor D8R para medir corrente e tensão.
###
Usando o CPPM do D8R-II-Plus
-
Conectar os canais 7 e 8 para entrada no modo de programação
-
Conectar um cabo USB FDTI com RX e TX invertidos na port UART do D8R-II-Plus
-
Gravar o firmware CPPM 27ms do D8R-XP
-
Depois de gravado remover o conexão entra os canais 7 e 8, e fazer uma entre os canais 3,4
-
Agora o canal 1 é o CPPM de 27ms e o canal 2 é o RSSI.
###
Usando a Telemetria UART do D8R-II-Plus
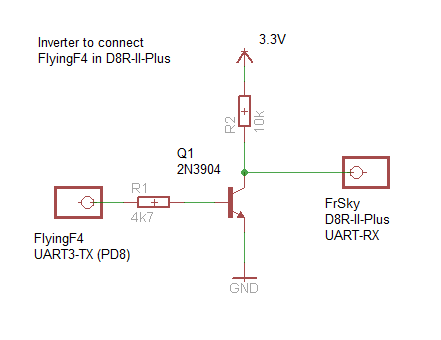 |
| Required inverter to emulate FrSky Sensor Hub Telemetry is working perfectly in my tests |
0) inverter o sinal do TX gerado pela FlyingF4 para conectar no RX do D8R.
1) configurar a porta como Frsky Sensor Hub
2) em Modules ativar o Frsky Sensor Hub
3) fazer o reboot para começar a receber a telemetria no Taranis
Dados que são recebidos pelo Taranis:
1) altitude (variable ‘Alt’)
2) temperatures (from baro and from accelerometer, variables ‘T1’ and ‘T2’)
3) x, y and z acceleration (variables ‘AccX’, ‘AccY’ and ‘AccZ’)
4) current, voltage and cell voltages (if battery module is enabled, variables ‘Curr’ and ‘Cels’)
5) gps data (if gps module has a fix, variable ‘GPS Alt’ latitude, longitude)
Usando o SBUS do X8R
 |
| Required Sbus inverter to use UART1 as Sbus input. Set Taranis to D16 mode and channel to 1-16. All 16 channels from X8R sbus work perfectly in my tests. |
###
Usando a Telemetria Smart Port do X8R
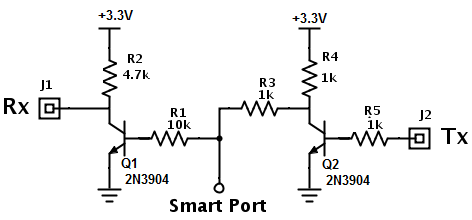 |
| FrSky Smart Port inverter |